

1
2
3
4
First Robot
First iteration of my first robot - with an ultrasonic rangefinder, it attempted to avoid walls and used simple behavioral style control.
Hand Strength Detector
A Force sensitive resistor, Arduino Micro, and hand-made strip of LEDs combine to make a strength tester.
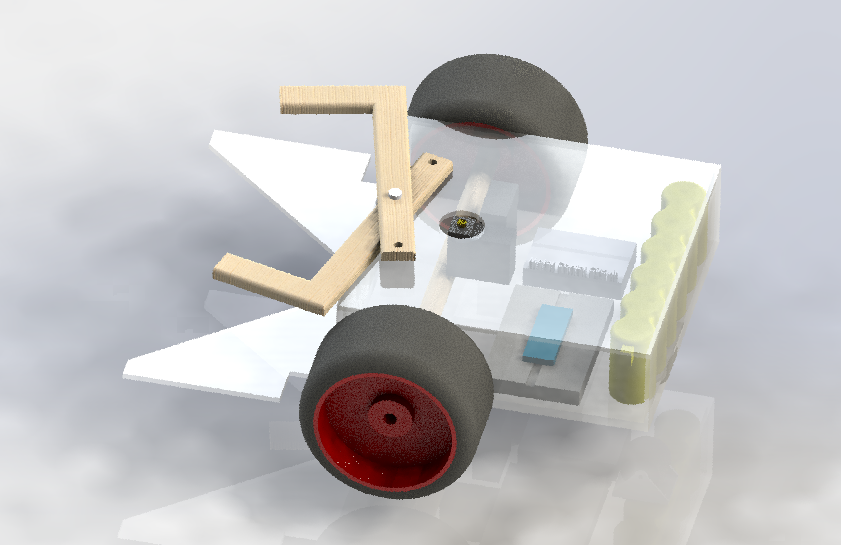
Second Robot
This simple robot uses two actuators - one to move forward, and the other to close the claws on top. This was for an intro to engineering class project, to move a water bottle forward a specified amount. The solution involved using a small microphone at the center of the “wedge” which, when combined with Arduino interrupts, signals the robot to close the claw when it collides with the bottle.
Robot hand project
Robot hand with direct finger control using flex sensors and Arduino Micro